Our paper “Propulsion and instability of a flexible helical rod rotating in a viscous fluid” has been accepted for publication in Physical Review Letters. More details on our research on the mechanics of bacterial flagella can be found here.
Our research on the mechanics of knots is in spotlight on MIT homepage today (09/09/2015). The MIT News article is here. More details on this research can be found here.
Our research focuses on the mechanics of bacterial flagella. Bacteria propel themselves by rotating one or more helical slender structures, known as the flagella. The rotation generates a propulsive force that allows for the bacteria to locomote. At this length-scale, viscous forces overcome inertia, and the flow is at low Reynolds number.
Two primary challenges in modeling flagella include:
Experimentally systematic manipulation of micron-sized bacterial flagella is difficult, and often impossible
Numerically, coupling the hydrodynamics of the fluid with the structural mechanics of the flagella pose a challenging fluid-structure problem
To overcome these two challenges, we take a two pronged approach, and combine desktop model experiments and cutting-edge simulation tools from computer graphics.
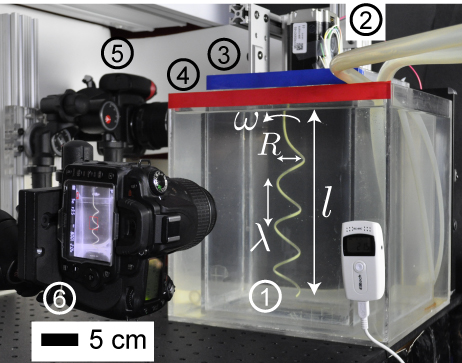
Experiments: As an analog system for flagella, we consider custom fabricated flexible helical rods of ~20 cm length, and rotate them in a bath of glycerine, see the image below. Our procedure allows us to systematically vary all the relevant parameters: material (Young’s modulus), geometry (rod radius, helix pitch, helix radius, length of rod), and fluid (viscosity). The setup is temperature controlled since it allows us to change the viscosity of the fluid medium.
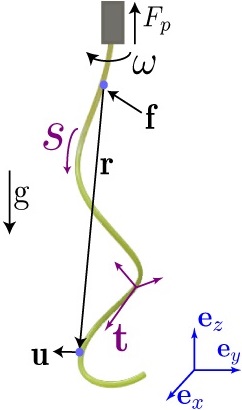
Figure: (a) Experimental apparatus: a helical rod (1), is rotated by a motor (2), inside a glycerin bath (3), that is enclosed by an external water tank (4) for temperature control. Two orthogonal video cameras (5,6) record the rod. (b) Schematic diagram of the rod.
Simulations: We performed numerical simulations where we combined Discrete Elastic Rods (DER) for an elastic description of the rod and Lighthill Slender Body Theory (LSBT) to model the hydrodynamics. DER describes a rod as a centerline parameterized by an arc-length parameter, s, and discretizes the line into a number of nodes. LSBT relates the velocity along the arc-length as a function of the viscous force applied by the fluid. Such a formulation accounts for the long-range hydrodynamic interaction between flows induced by distant parts of the rod. This is in contrast with Resistive Force Theories that use local drag coefficients, and can result in oversimplification.
Results: The flexibility of the flagellum interacts with the hydrodynamics to produce novel physical phenomena. Above a certain critical angular velocity, the hydrodynamic forces cause the rod to buckle (see video above). Our analysis shows that this buckling instability can potentially happen in biologically relevant regime. We hypothesize that natural bacteria exploit this instability for physiological purposes, e.g. to change swimming direction. For more details, please refer to our publications below.
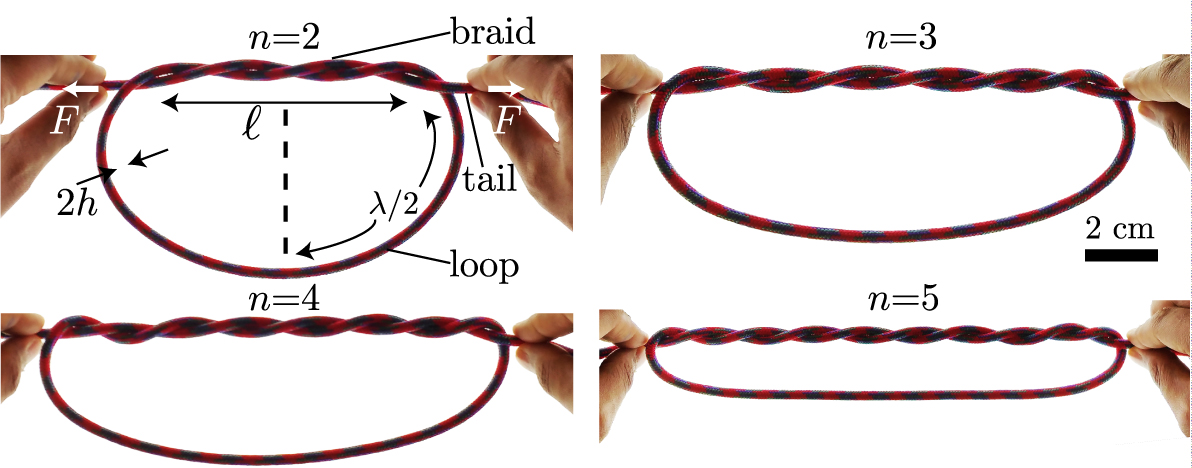
The simplest type of knots that we tie everyday is known as the overhand knots. The topology of overhand knots is defined by the unknotting number, n ( number of times the knot must be passed through itself to untie it, see figure above). Shoelaces are commonly tied using the reef knot, which comprises two overhand knots each with n=1. We combine experiments and theory to study the mechanics of overhand knots, and essentially answer the question how much force has to be applied to tighten the knot. Excellent agreement is found between theory and experiments for overhand knots over a wide range of crossing numbers.
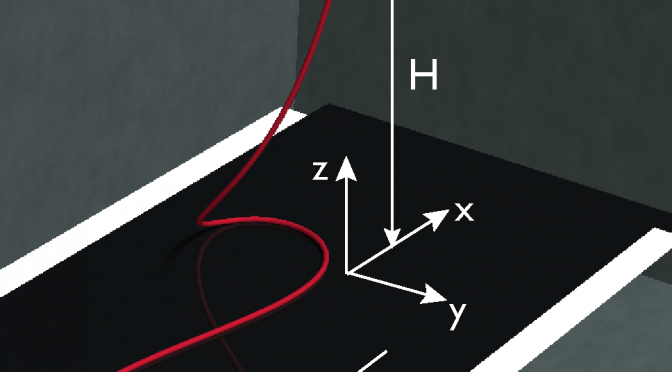
Submarine cables and fuel pipelines are typically deployed underwater from a cable-laying vessel. Operation PLUTO during World War II and the first transatlantic telegraph cable are two historical examples. Inspired by this, we consider a model desktop experiment where slender elastic rod is injected onto a moving conveyor belt. We explored this system, known as the elastic sewing machine, through a combination of precision desktop experiments and computer simulations
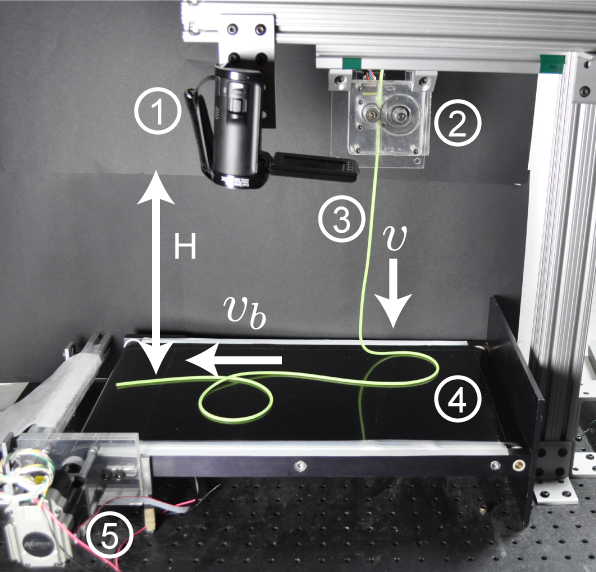
Experiments: We fabricated a meter-sized model setup, and injected elastomeric rod onto a conveyor belt. The injection speed and belt speed were carefully controlled. Sizing down the kilometer scale problem onto a desktop is possible owing to the scale-invariance of the mechanics of slender structures.
Figure: Photograph of the experimental apparatus. An injector (2) deploys an elastomeric rod (3) at a speed, v, from a height, H, onto the belt (4) moving at speed, vb, driven by a stepper motor (5). A video camera (1) records the process.
Numerical simulations: We employed the Discrete Elastic Rods (DER) tool for numerical simulation of the deployment process. DER was originally developed for simulation of hair, fur and other rod-like structures targeting the movie industry. The source code for simulations is here.
Pattern formation: Depending on the difference in speed between the injector and the belt, fascinating periodic patterns can form. For a visual abstract, click here.
When the belt is fixed, the rod coils in a circular fashion. We call it Static coiling. The figures below include experiments (green rod) and simulations (red rod) without any fitting parameter.
However, if the rod has natural curvature (typically induced from storing of cables spooled around a cylinder), it periodically changes the direction of coiling from clockwise to anticlockwise (or vice versa).
When the belt is moving, we see a variety of patterns. Some are shown below.
Towards a physical understanding: We observe four main patterns: meandering, alternating loops, translated coiling, and stretched coiling. In the figure below, we show the phase diagram along belt speed and injection speed, and find that the various regions are separated by straight lines passing through the origin. This indicates the pattern formation to be governed by the dimensionless speed mismatch, (v-vb)/v, which we take as the primary control parameter.
We provide detailed analysis of the pattern formation process, and universal description of the pattern morphology, see our publications [PNAS 2014, EML 2014] for details.
Geometric model: When a thin thread of honey is poured onto a moving belt, patterns similar to the ones described above form. Click here for a video from U. Toronto. This system, known as the Fluid Mechanical Sewing Machine (FMSM), is similar to our Elastic Sewing Machine only in geometry. The constitutive description of honey (or viscous fluid) is very different from that of an elastic solid. It underlines the importance of geometry in both the processes, and encouraged us to form a Geometric Model (GM). The GM describes the pattern formation process from a geometric point of view, and allows for physical insight (details in this paper).
In the figure below, the regions of stability of various patterns along our control parameter, the dimensionless speed mismatch, in the Elastic Sewing Machine (ESM) and Fluid Mechanical Sewing Machine (FMSM) are shown. These regions are computed using both the Discrete Elastic Rods (DER), or Discrete Viscous Rods (DVR) in case of FMSM, and the Geometric Model (GM). The results for FMSM are obtained from Brun et al, 2015. It should be surprising to note the quantitative similarity in pattern formation in these two distinct systems.
Click here for a standalone version of the plot below.
A summary of our ongoing work on elastic gridshells (from the abstract of presentations at IMECE 2016 and SES 2016):
Elastic gridshells comprise an initially planar quadrilateral network of elastic rods that is actuated into a three-dimensional shell-like structure by loading its extremities. This shaping results from elastic buckling and the subsequent geometrically nonlinear deformation of the grid structure. The first examples of architectural elastic gridshells appeared in the 1970’s but, to date, a limited number of these structures have been constructed around the world, primarily due to the challenges involved in their structural design. Yet, elastic gridshells are extremely efficient structures: they can cover wide spans with low self-weight, they allow for a variety of aesthetically pleasing shapes and their construction is typically simple and rapid. Developing predictive frameworks with mechanics at their core, which combine computational tools together with physically-based design guidelines, are important for the early stages of architectural design of this class of structures.
We study the mechanics of elastic gridshells by combining precision model experiments that explore the scale invariance of the problem, together with quantitatively predictive computer simulations that employ the Discrete Elastic Rods (DER) method. Our experimental samples are custom fabricated by first laying out a square grid (with a prescribed boundary contour) of Nitinol rods over an acrylic mold etched by a laser-cutter. An elastomeric polymer is then poured over the crossing nodes to cast joints with well defined mechanical and geometric properties. These joints impose positional constraints, but have negligible in-plane shearing stiffness and no bending-twisting coupling, thereby greatly simplifying the analysis. Each gridshell is then loaded by displacing the extremities of each rod along radial paths towards the center of the structure. The buckled configurations that ensue are digitized using a 3D laser scanner and their mechanical response is also measured.
In parallel, we perform computer simulations that employ the DER, a method that was originally developed by the computer graphics community for the simulation of hair. However, we have since shown that DER has remarkable predictive power for engineering mechanics problems involving large deformations of filamentary structures. In our computed elastic gridshells, the rods are connected to each other at the joints via springs, and the loading is applied by prescribing the displacement at their extremities. Excellent agreement is found between the experiments and simulations. Upon validation, the numerics are then used to broadly explore parameter space towards identifying general design principles for specific target final shapes. Our findings are rationalized using the theory of discrete Chebyshev nets, together with the group theory for crystals. Higher buckling modes occur for some configurations due to geometric incompatibility at the boundary and result in symmetry breaking. Along with the systematic classification of the various possible modes of deformation, we provide a reduced model for form-finding in elastic gridshells.